Through an internal design review process and an audit process by ESO for the entire instrument during 2021 and 2022, a high risk of not meeting the performance was identified for the image quality and WCS (World Coordinate System) knowledge, as well as difficulties for maintenance access. As a consequence, major changes to the NGSS LOWFS subsystem were requested.
Since then, the LOWFS team from CAB and University of Durham has been working with the NGSS system team on proposing an updated LOWFS with a two NGSS arm design that would allow for better image quality performance, WCS performance and a different mechanical architecture that allows for easier maintainability and access.
The development work on LOWFS is restarting on a new baseline for many of its content and the main objectives were to present and discuss the updated set of LOWFS requirements, the updated baseline for the architecture and possible changes to NGSS system interfaces. After a meeting at which the new design and architecture proposal for the LOWFS was agreed and subsequently approved by the ESO at the end of last year, the baseline architecture will be further developed during preliminary and critical design work for 2023-2024.
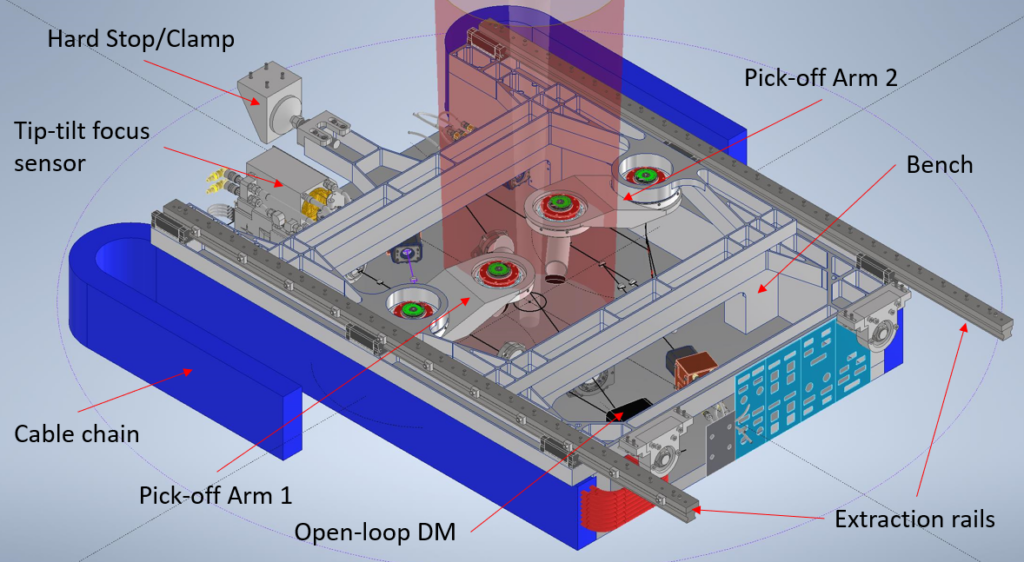
Apart from the addition of the second arm, LOWFS will be placed on a fully extractable bench with rail plus carriage extraction mechanism and also, the NGSS environment temperature increases from -15ºC to +2ºC.
The following image shows the new baseline design for the LOWFS:
New architecture for the LOWFS. Credit: HARMONI Consortium.
How much does this situation affect the current POA design?
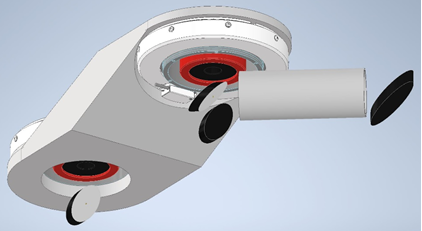
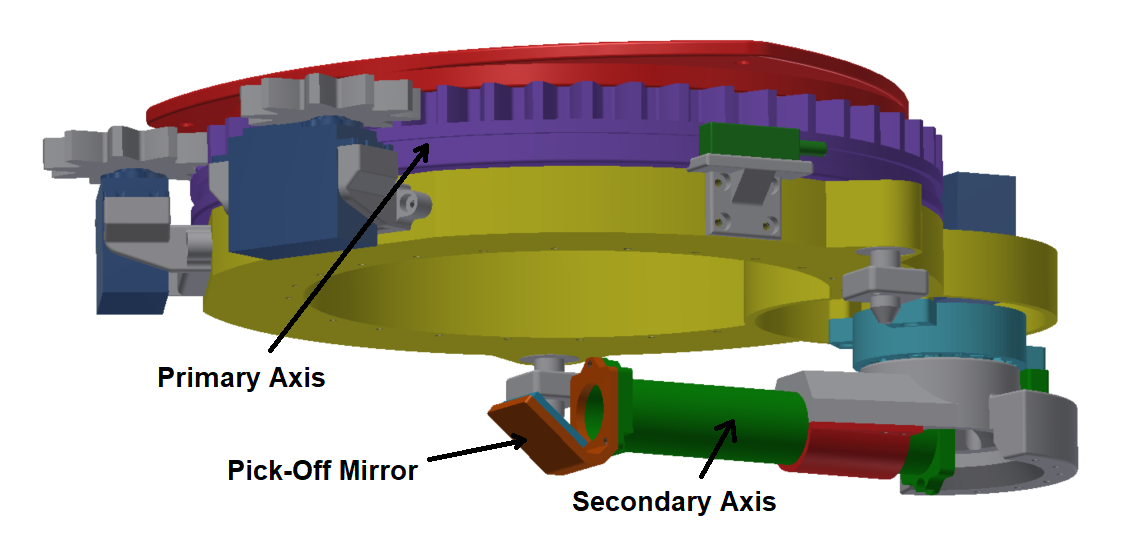
The design and architecture of the POA are significantly affected by all these changes. Although the configuration remains “theta-phi”, a “shoulder-elbow” architecture will now be implemented, whereby the primary axis is no longer a rotating mechanism and becomes a fixed device that moves the assembly formed by the secondary axis and the POM (Pick-Off Mirror), which will be steerable.
POA early concept design.
The good news is that all the work, knowledge and studies developed for the secondary axis’ engineering model of the previous architecture will be used for the primary axis of the new design, so it could be said that the mechanism has been renamed, but it remains the same. In addition, both axies will now use the same brushless motor technology and “direct-drive” type configuration.
The XV Scientific Meeting of the Spanish Astronomical Society (SEA) was held in La Laguna University (Tenerife) between September 5th and 9th, 2022.
The meeting was organized, as on previous occasions, in the form of plenary and parallel sessions. It included the traditional group meetings, the presence of companies, and events open to the general public.
This time, the Italian Astronomical Society and its astronomical community were invided as it is SEA’s intention to publicise existing scientific collaborations between groups from both countries and promote the start of new ones.
Congress topics: Planetary Sciences; Cosmology and Astroparticles; Education, Outreach, and Heritage; ESO and Spain: scientific results; Solar Physics; Galaxies; Instrumentation and Computation; The Milky Way and its Components.
On this occasion, the CAB HARMONI team gave a talk and presented a poster.
“CAB contribution to the instrument ELT-HARMONI: the last steps of its design phase” by Dr. Javier Piqueras López
Abstract: HARMONI is the optical and near-IR integral field spectrograph (IFS) selected as a first-light instrument for the Extremely Large Telescope (ELT). With four spatial scales (30, 20, 10 and 4 mas) and a wide range of spectral resolving powers (3500-18000), HARMONI will allow astronomers to address many of the ELT science cases. The Centro de Astrobiología (CAB INTA/CSIC) and the Instituto de Astrofísica de Canarias (IAC) form part of the international consortium developing HARMONI, participation that will constitute a unique opportunity to access to the ELT as soon as it becomes operative via the guaranteed time. We describe here the current status of the CAB contribution to HARMONI, which currently is on the final stages of Phase C (Final Design). In particular, we will focus on the technical work-packages developed at CAB, i.e. the Calibration Module (CM) of the instrument and the Low-Order WaveFront Sensing sub-system (LOWFS), as well as on the status of the Calibration Plan of the whole instrument. We will briefly describe the detailed designs of these sub-systems, the prototype activities under development at CAB, and the planning of the MAIT that will start by the second half of 2023.
“HARMONI at ELT: An evolvable software architecture for the instrument pointing model“
Abstract: HARMONI is the first light visible and near-IR integral field spectrograph for the ELT. In order to achieve its maximum resolution level, both HARMONI and ELT must co-operate in closed loop mode, correcting its pointing continuously. This is done by measuring the position of natural guide stars (NGS) outside the science field (in the so-called technical field) using a guiding probe in the form of a mobile mirror named Pick-Off Arm (POA). Since the POA must be installed in a controlled-temperature environment, ELT’s focal plane must be relayed from the Nasmyth platform to the POA by means of focal plane relay optics.
This design introduces a series of optomechanical stages that will affect the pointing measurements by systematic and random error contributions. To correct the former and characterise the impact of the latter (as well as the performance of any necessary corrective model), simulations of the pointing error measurement process are required.
We introduce harmoni-pm: a Python-based simulator prototype which, departing from a geometric optics modelisation of the instrument, attempts to reproduce the main drivers of the instrumental pointing error. harmoni-pm features a software architecture that is resilient to instrument model refinements and enables performance analyses of corrective models based on simulated calibrations. Results showed that the relay optics are the main drivers of the instrumental pointing error (order 200 µm). The current simulator has been also critical in the design of a corrective model that not only takes noisy measurements into account, but also error distributions thereof. This motivated the development of a Bayesian corrective model that is able to integrate the uncertainty of noisy measurements into the posterior knowledge of the final corrective model parameters.
Would you like to collaborate in the development of several subsystems of the HARMONI instrument for the ELT telescope? At CAB we are recruiting for 3 positions in different disciplines!
The Centre for Astrobiology (CAB)
The CAB is a unique astrobiology research centre in Spain. Its transdisciplinary nature, its alliances, experience and track record make it a highly competitive environment, perfect for the development of the most relevant projects worldwide, such as Mars 2020, James Webb Space Telescope, Extremely Large Telescope/HARMONI, Exomars, Curiosity and Plato, among others. It is a joint centre between CSIC and INTA, with its main headquarters at the INTA campus (Torrejón de Ardoz) and a secondary headquarters at ESA‘s European Space Astronomy Centre (ESAC).
The ELT-HARMONI project
In the current race to unravel the mysteries of the universe, international organisations are working to build ever more powerful and precise telescopes and instruments, pushing the limits of technology. The Extremely Large Telescope (ELT) will be the largest optical and infrared telescope ever built. HARMONI will be one of the first-light instruments, where the CAB is leading the design of two modules: the calibration module (CM) and a micro-precision electromechanical positioning system for the adaptive optics (LOWFS). In this context, the CAB group responsible for the development of HARMONI is looking for three people to join its engineering team. The recruited people will have the opportunity to participate in a leading technological sector, in a unique project, and in an international environment collaborating first hand with other partners of the international HARMONI Consortium, formed by the leading experts in the development of astrophysical instrumentation, such as: University of Oxford, UK Astronomy Technology Centre (Edinburgh, UKATC), Durham University, Laboratoire d’Astrophysique de Marseille (LAM), Centre de Recherche Astrophysique de Lyon (CRAL), Instituto de Astrofísica de Canarias (IAC) and the University of Michigan.
Job positions
1. Mechanical Engineer
2. Optical Engineer
3. AIT Engineer
The tasks and minimum requirements for each position are specified in the document located at the end of this post.
Contact
If you are interested, please contact us at the following email addresses:
The Society of Photo-Optical Instrumentation Engineers (SPIE) held the biennial event “SPIE Astronomical Telescopes + Instrumentation” in Montréal, Canada, from 17th to 22th of July, 2022.
The meeting (held in person for the first time since 2018) featured over 2,000 technical presentations focused on the latest engineering advancements of technical aspects of ground-based, airborne, and space-based telescopes, and their supporting instrumentation. The spotlight went to the JWST, with more than 50 presentations, but other major projects also received attention, such as NASA Exoplanet Archive, the ELT, the Gemini High Resolution Optical Spectrograph (GHOST), the Near InfraRed Planet Searcher (NIRPS) and the future technology requirements for ESA missions.
In addition to the technical presentations, the meeting hosted nearly 100 companies during a three-day exhibition, offer focused continuing-education courses and provide a dedicated Community Lounge where most of the numerous networking and social events were held.
At this congress, all the teams of the institutions that are part of the HARMONI Consortium presented papers and posters (and even gave a presentation, such as this).
In particular, the CAB HARMONI team presented a paper, two posters and a 3D printed scale model of the LOWFS:
“HARMONI at ELT: Pick-Off Arm module design status and protoype results” by Alberto Estrada Piqueras (article and poster)
Abstract: HARMONI is the first light visible and near-IR integral field spectrograph for the ELT. It covers a large spectral range from 450nm to 2450nm with resolving powers from 3500 to 18000 and spatial sampling from 60mas to 4mas. It can operate in three Adaptive Optics modes – SCAO, HCAO and LTAO – or with NOAO. The project is preparing for Final Design Reviews. The Pick-Off Arm (POA) module is part of the Low Order Wavefront Subsystem (LOWFS) which provides field stabilisation and low-order wavefront sensing in seeing-limited and LTAO observing modes, measuring the motion of the instrument focal plane relative to the telescope wavefront sensors. The POA module provides the source acquisition and tracking capabilities with 6 μm accuracy over a technical field of 400 mm (120 arcseconds) in diameter. The acquired beam is then reflected into the AO bench (LOB). A two-axis theta-phi architecture is proposed, with a large 600mm diameter “theta” axis carrying at its perimeter a small “phi” axis; the combined rotation of both therefore allowing a 300mm long periscope carried on the phi axis to position a Pick-Off Mirror anywhere within the full technical field. A flow-down of the main requirements is presented, describing the interaction between the different error contributors and the overall accuracy budget. Furthermore, we present the POA baseline design, together with the analysis of the technologies used within the POA different units. Finally, the prototype activities developed are also described with preliminary results of tests demonstrating the required positioning accuracy.
“HARMONI al ELT: an evolvable software architecture for the instrument pointing model” by Gonzalo J. Carracedo Carballal (poster)
Abstract: HARMONI is the first light visible and near-IR integral field spectrograph for the ELT. To achieve its optimal image quality, an accurate measurement of the telescope’s pointing error is necessary. These measurements are affected both by systematic and random error contributions. To characterise the impact of the latter (as well as the performance of any necessary corrective model), simulations of the pointing error measurement process are required. We introduce harmoni-pm: a Python-based prototype which, departing from a geometric optics modelisation of the instrument, attempts to reproduce the main drivers of the instrumental pointing error. harmoni-pm features a software architecture that is resilient to instrument model refinements and enables performance analyses of corrective models based on simulated calibrations. Results showed that the relay optics are the main drivers of the instrumental pointing error (order 100 μm). Additionally, simulated calibrations of corrective models based on truncated Zernike expansions can compensate for systematic pointing errors up to a residual of order 1 μm.
First face-to-face meeting of the entire HARMONI Consortium after the COVID-19 pandemic. It took place at LAM (Laboratoire d’Astrophysique de Marseille) from 7th to 10th of june, 2022.
General meetings on the status of the project, management, schedule and project milestones were located in the conference hall of the LMA (Laboratorie de Mécanique et d’Acoustique), while the spliter sessions of each system and discipline were held within the LAM.
HARMONI poster at LAM entrance
The CAB HARMONI team attended the following splinter sessions: NGSS, CARS, HCS, NGSS-LOWFS, Electronics (ICE), AIT, Top-end AIT, Instrument AIT/AIV, Mechanical and Software.
In addition, the LAM HARMONI team showed the rest of the consortium their laboratories and the facilities where the AIT Top-End phase will take place.
ELT miniature
Finally, there was also some time to visit Marseille and its surroundings.
From 19/04/2022 to 22/04/2022, the network for the development of new spatial instrumentation technologies of the Madrid Community (TEC2SPACE-CM) held “RIA-Tec2Space Meeting: Spanish Astronomy Instrumentation“, a meeting that gives continuity to those organised since 2007 aiming to establish a discussion forum for the Spanish astronomical community involved in the development of instrumentation, including both scientist in public research institutes and instrumentation private companies.
The conference took place in “Salón de actos del edificio Central CSIC” (Serrano 117, Madrid) and was coordinated by the Centro de Astrobiología (CAB, CSIC-INTA).
Specifically, this edition focuses on promoting opportunities for collaboration in space science, opening a discussion forum for the national astronomical community involved in the development of instruments. Likewise, the conference aims to be a meeting point to learn about and discuss opportunities for Spanish entities to participate in ground and space science programmes, including both the research community and companies.
Conference poster
During the meeting, the HARMONI team of the CAB gave 3 different lectures:
“CAB Contribution to the Instrument HARMONI for the ELT” by Dr. Javier Piqueras López
The LOWFS Pick-Off Arm (POA) is an assembly of two rotating mechanisms in a “theta-phi” configuration inside the NGSS system. Its purpose is to patrol the telescope’s technical field accurately, to ensure image stabilisation and to transmit the light captured by the Pick-Off Mirror from the technical field to the subsystem detectors.
Due to the high precision to be achieved and all the restrictions imposed by the requirements (especially in volume, as the POA has to be very small in height) it has been necessary to study and compare different motion technologies in depth.
One of the first proposals for the secondary axis was to use stepper motors with a 5000:1 three-phase reduction gearbox. However, since the backlash of the mechanism has to be almost non-existent and the mechanism took up a lot of space, this solution was not satisfactory. Therefore, it was decided to implement a brushless motor in direct drive configuration.
To validate the electromechanical design of the POA’s secondary axis, the CAB HARMONI team has developed an engineering model of the secondary mechanism. The purpose of this prototype is to verify through numerous tests that the chosen technological solution is valid and meets the strict requirements for positioning and repeatability, which are 6.1 μm RMS and 0.8 μm RMS over distances of 3.3 mm respectively at a speed of ±2000 arcsec/s.
It is driven by a 6-pole frameless brushless motor, of 400 VAC power supply and inrunner architecture (the rotor is on the inside and the stator is on the outside). The motor is in ‘direct drive’ configuration, what means that the rotor shaft is directly coupled to the arm, without any gearbox or other mechanism. In addition, an incremental encoder with more than 30,000 lines is used to determine the angular position of the arm.
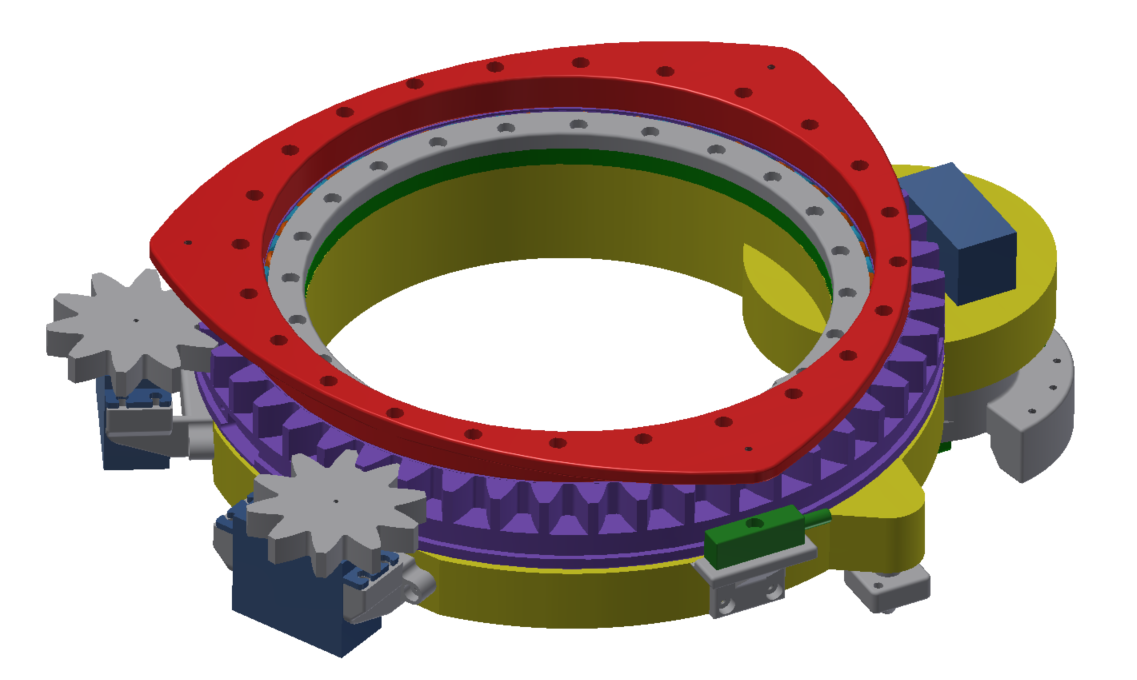
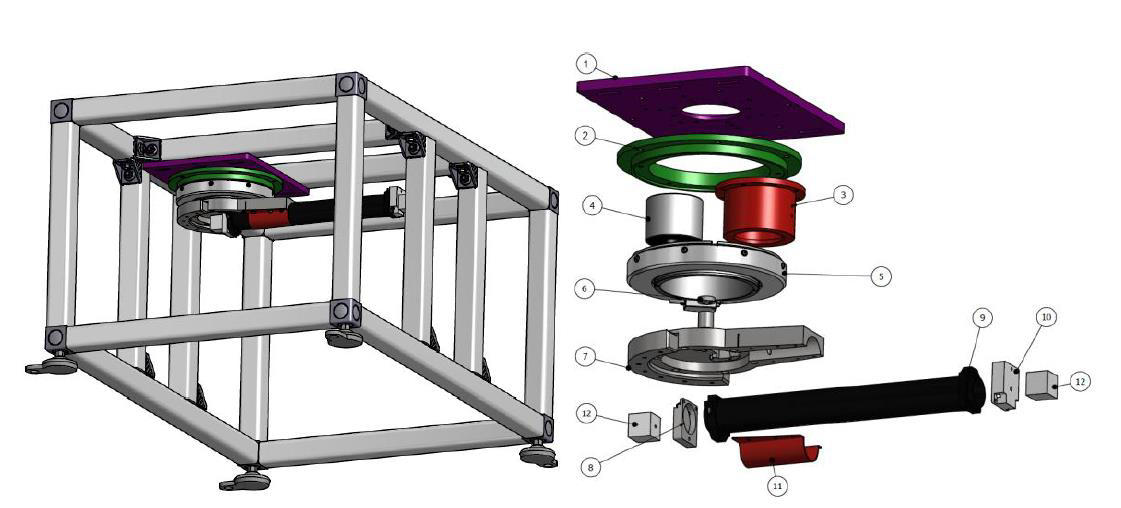
The following image shows an exploded view of the secondary axis and the structure used to support it. Also, see that cubic mirrors are placed at both ends of the arm to allow the measurement of the position of the arm with external instrumentation, instead of the bending mirrors of the actual design.
Exploded view of the secondary axis and the support structure.
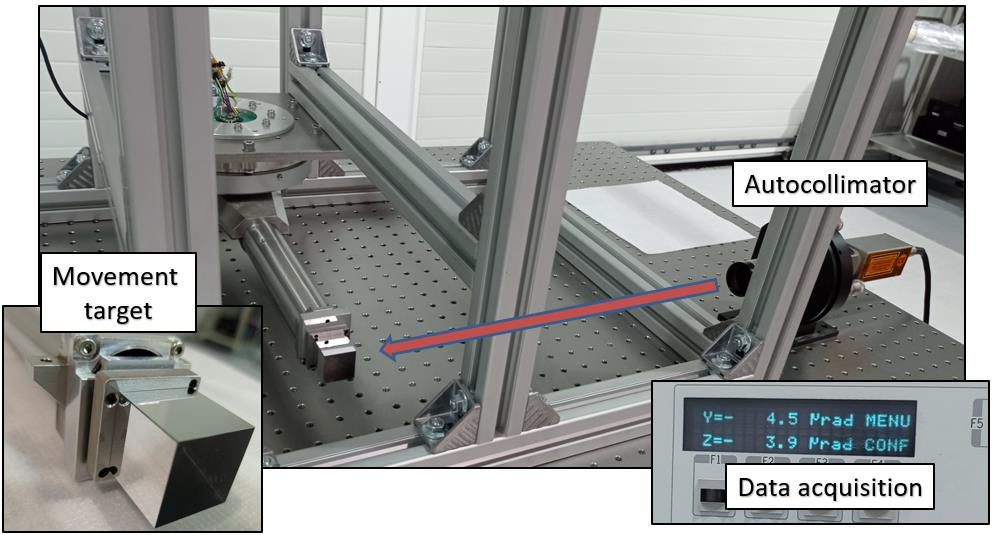
The instrument used to perform the external measurement of the arm’s position is an autocollimator, which is an optical instrument that uses the reflection of a monochromatic laser to measure small angular differences with respect to two axes with a high accuracy (below 1 μrad), but in a very small range (2000 μrad).
Assembly of the engineering model in the laboratory.
After many tests, the results have pleasantly surprised the team and the Consortium alike, as the response of the mechanism is very good and almost within the requirements even without using the final electronics and runnig a fully tuned control loop.